Robot Design & Strategy
From lessons learned to innovative solutions — our journey of robot evolution and strategic development for the Masterpiece Challenge.
Design Decisions
Previous Configuration
Front Motor
Back Motor
Problems Identified
- • Motor height mismatch
- • Plate instability
- • Difficult back motor access
- • Unreliable attachments
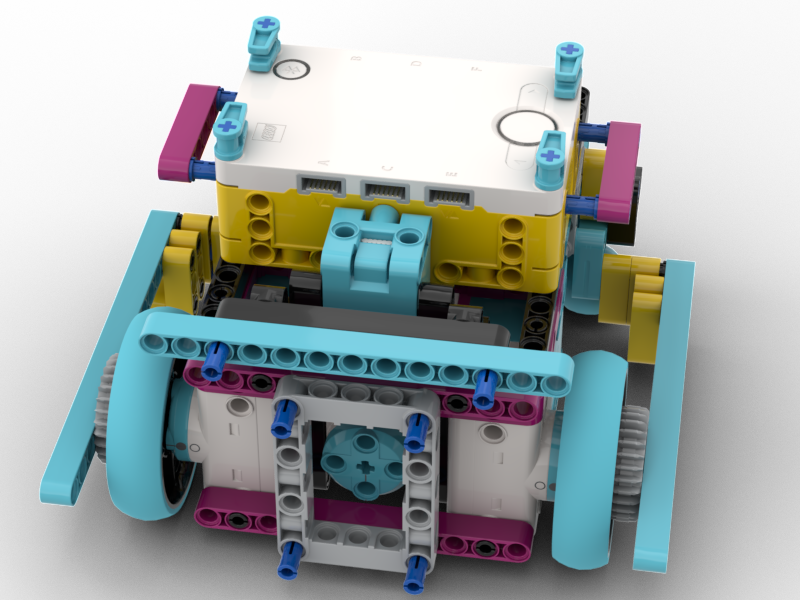
Current Configuration
.gif)
Front-mounted dual motors
Stable base design
Improvements Achieved
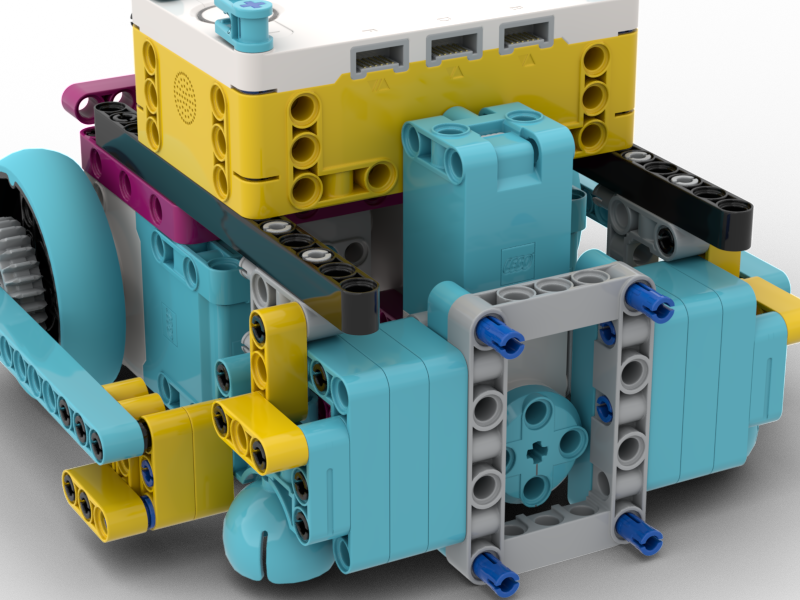
- • Same motor height & orientation
- • Flat motor positions for easy attachment insertion
- • Easier motor access and maintenance
- • Reliable pinless locking with gear stabilization
Robot Design Evolution Timeline
Starting Base
Initial foundation design with basic drive system
Iteration 1
First working prototype with improved motor positioning
Iteration 2
Refined design with pinless attachment system in action
Final Design
Completed base with optimized attachment system
Key Design Decisions
Problems from Last Year:
- • Different motor heights caused accessibility issues
- • Front plate instability during attachment swaps
- • Unreliable performance under pressure
Solutions Implemented:
- • Dual front-mounted motors at same height
- • Pinless, gravity-assisted attachment system
- • Gear locking for stability and consistency
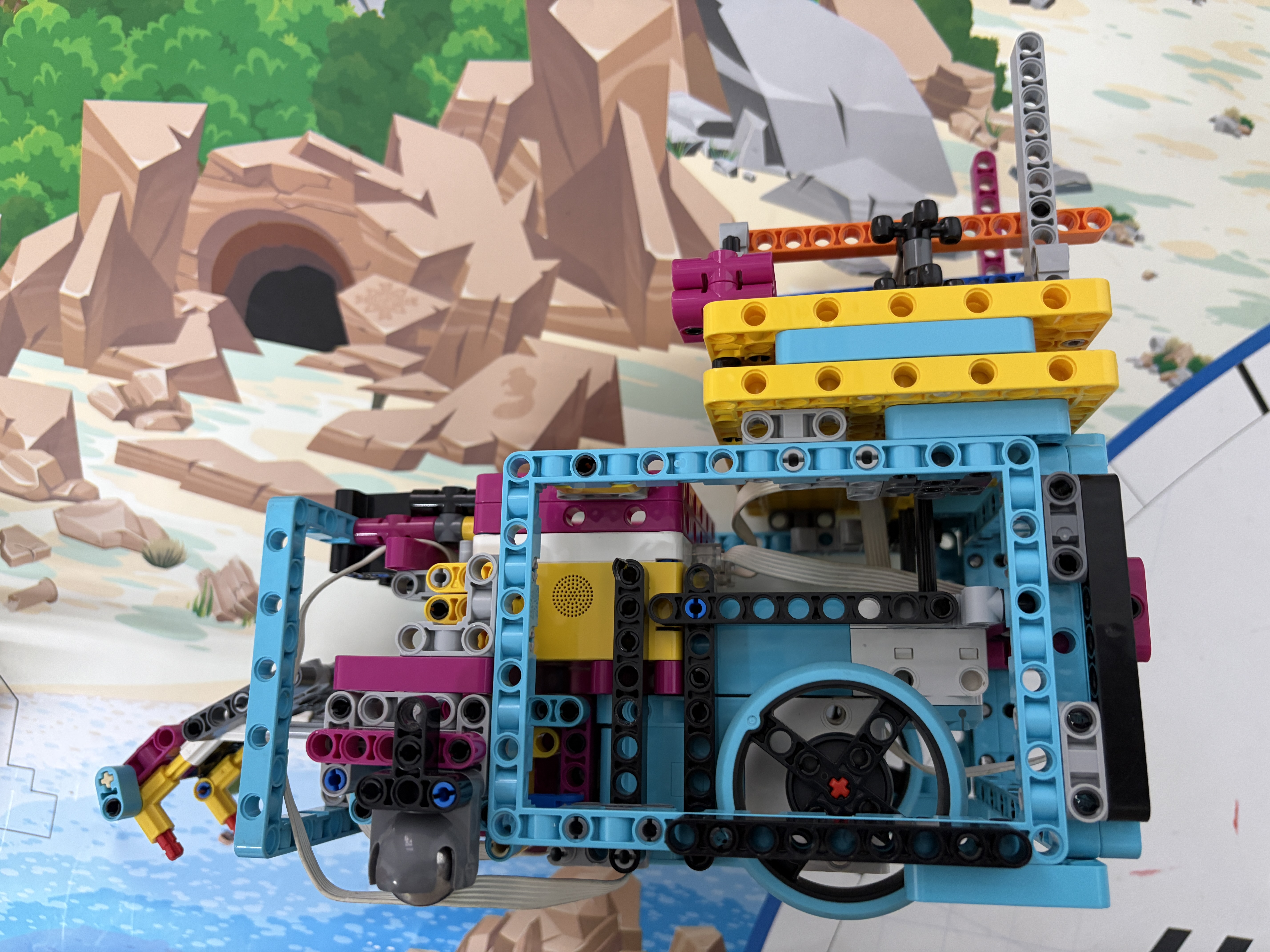
Pinless Attachment System

Drop-In Design
Attachments sit on top with axle dropping into holes—gravity helps hold them in place.
Stability System
Added gear locks reduce wobble for heavier attachments.
Rapid Swapping
Quick-swap design enables faster mission transitions and less downtime.